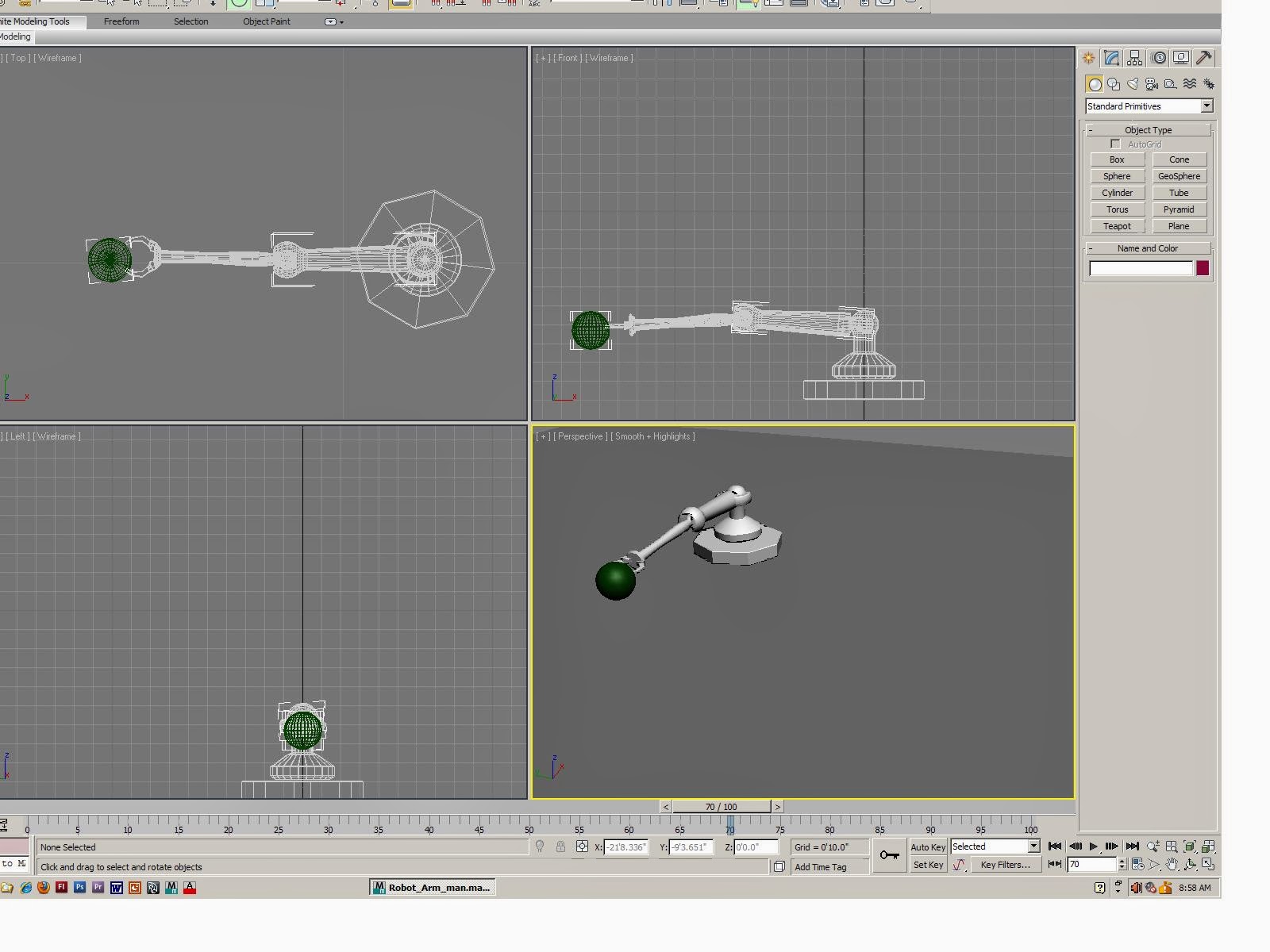
This week I learned about link constraints and pivot point adjustments. I adjusted the pivot points of the robot arm and used the parent and child setting so i can animate the robot arm. I learned how to use link constraints so i could have the robot arm have an object attach to it in a certain frame so it looks as if the arm is picking up the object.
No comments:
Post a Comment